
|
(hive分区主要是为了提高检索效率,内部表和外部表都可以创建分区) 静态分区操作数据 Hive 在创建表时添加分区partition b、单分区建表语句: c、 双分区建表语句: (表已创建,在此基础上添加分区): Hive删除分区语法: 动态分区操作数据 普通建表 建分区表 插入数据 在插入数据的时候,会报错如下: 解决方案: 参考文档链接 https://hugh-wangp.iteye.com/blog/1612268
版权声明:本文为qq_36306340原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
本文链接:https://blog.csdn.net/qq_36306340/article/details/91043075
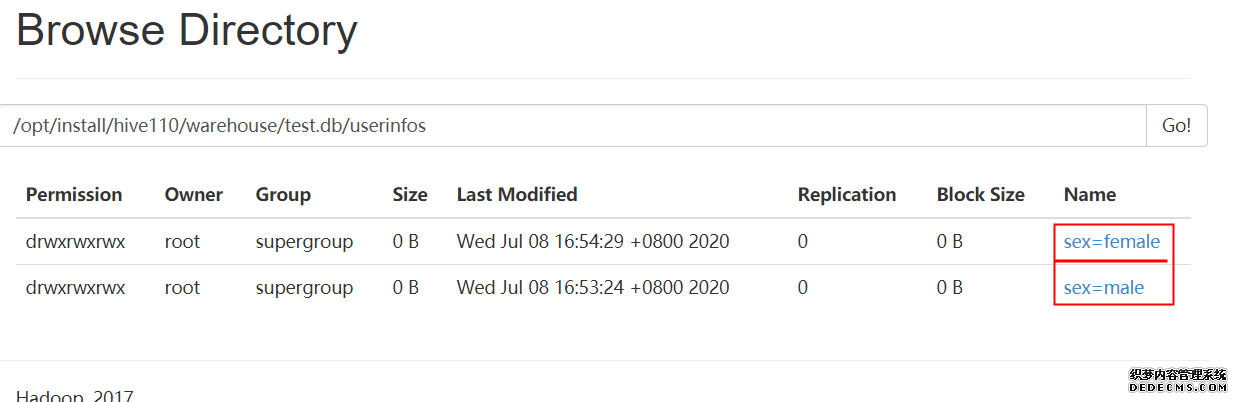
文章目录 分区目的 分区的创建 1.创建建表时候不管动态还是静态分区 2.执行load 装载数据 3.查看表结构,查询分区表的数据 4.静态分区: 5.动态分区: 多分区 表分区的增删改查 分区目的 -分区主要用于提高性能 -分区列的值将表划分为一个个的文件夹 -查询时语法使用"分区"列和常规列类似 -查询时Hive会只从指定分区查询数据,提高查询效率 -分为静态分区和动态分区... 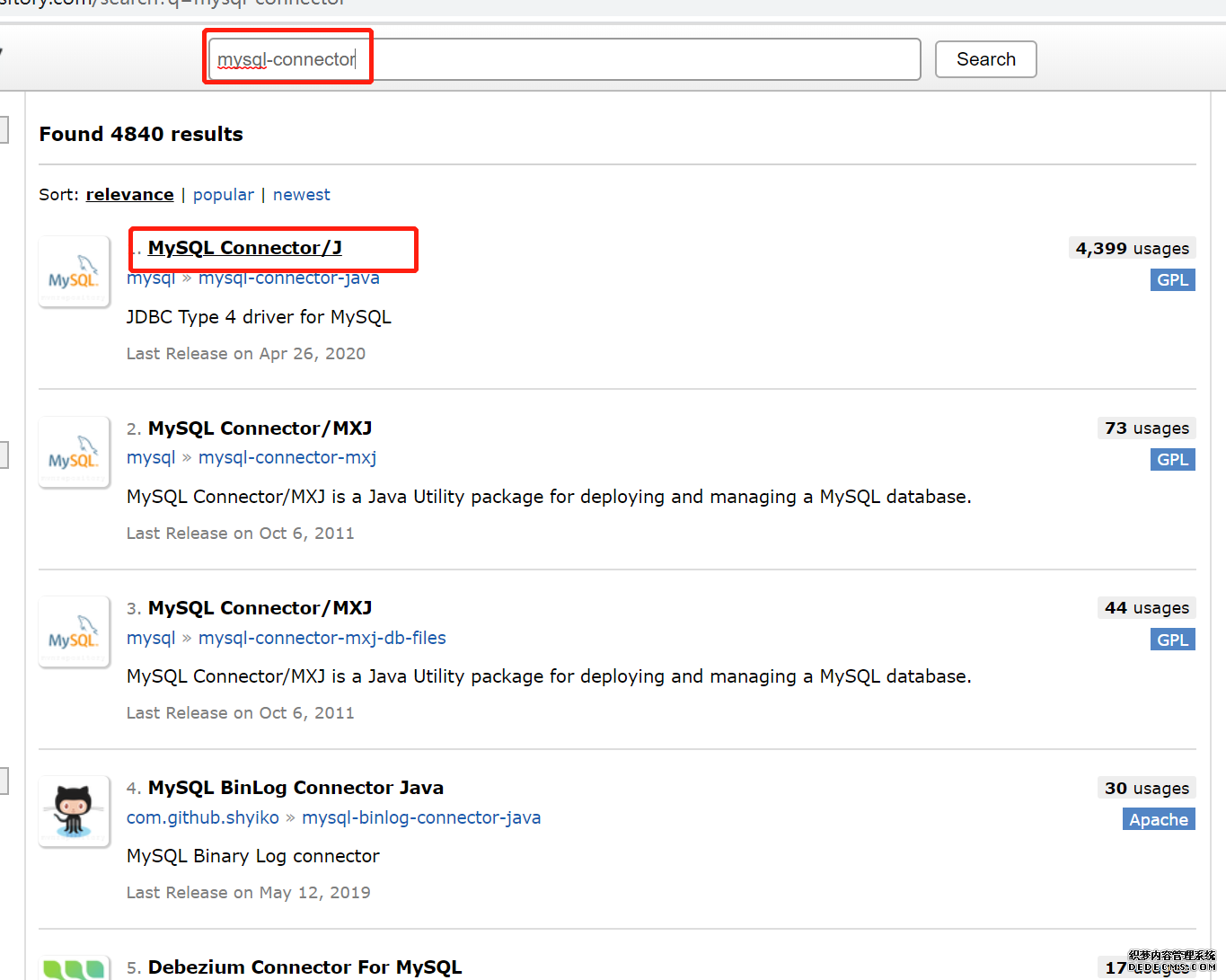
1、去maven repository仓库 下载mysql-connector-java-5.1.6.jar包、mybatis-generator-core-1.3.2.jar包: mysql-connector-java-5.1.6jar mybatis-generator-core-1.3.2.jar 2、找一个地方新建一个文件夹,里面新增一个src的空文件夹,还有一个generatorCon... 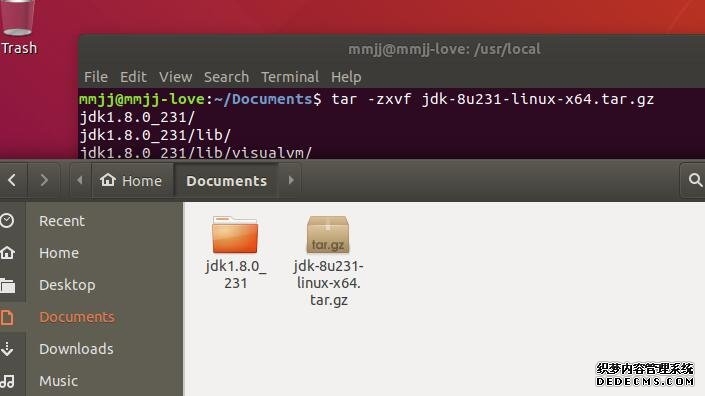
环境选择 Hadoop官方虽然支持Windows系统,但是需要自行编译或者下载别人编译好的util,而且像Hbase这样的组件不支持在windows平台下伪分布式安装,所以这里选择的是Ubuntu环境。 Ubuntu 18.04 JDK:1.8.0._231 Hadoop:3.2.1 创建用户 为了方便区分用户功能以及便于管理,一般会创建一个新的用户专门用来管理Hadoop生态。 这里以创建had... 
概述 高仿简书个人中心头像放大缩小,头像的点击,下面的分类等 详细 代码下载:http://www.demodashi.com/demo/11226.html 一、准备工作 高仿简书个人中心上下 左右滑动页面,开始做之前,首先思路要清晰,逻辑比较繁琐。 首先看到简书个人中心页面时,我大致给他划分为4大部分: 1,首先是用户的头像 2,用户资料信息 3,三个标题(TitleView) 4,下面UIT... 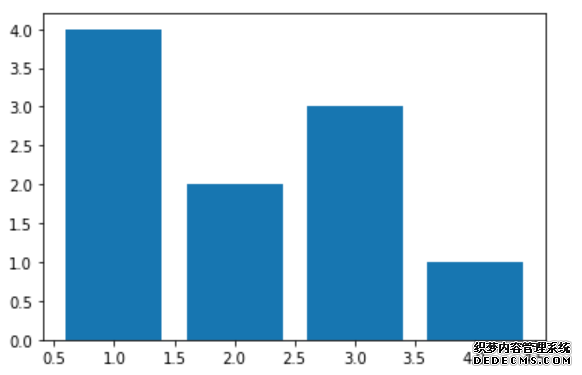
在matplotlib中,bar命令用于绘制柱状图,基本用法如下在matplotlib中,bar命令用于绘制柱状图,基本用法如下在matplotlib中,bar命令用于绘制柱状图,基本用法如下在matplotlib中,bar命令用于绘制柱状图,基本用法如下在matplotlib中,bar命令用于绘制柱状图,基本用法如下 欢迎关注”生信修炼手册”! 在matplotlib中,... 
... 
前言 除了使用已有的图片之外,Android应用常常需要在运行时根据场景动态生成2D图片,比如手机游戏,这就需要借助于Android2D绘图的支持。本篇博客主要讲解一下Android下使用Canvas进行绘图的相关操作。最后将以一个简单的Demo演示如何使用Canvas在ImageView上画图并保存。 本篇博客的主要内容: 画布Canvas 画笔Paint 使用Canvas绘... 
面向对象的写法很多时候我们需要建立公共函数,在其他控制器都可以引用这个方法,比如存储文件什么的,步骤如下, 1、在app目录下建立functions.php文件 2、配置 composer.json 项目根目录下的composer.json文件里面的autoload输入 3、执行 composer 命令: 4、搞定,需要定义什么在functions.php就好,其他控制器可以直接使用... 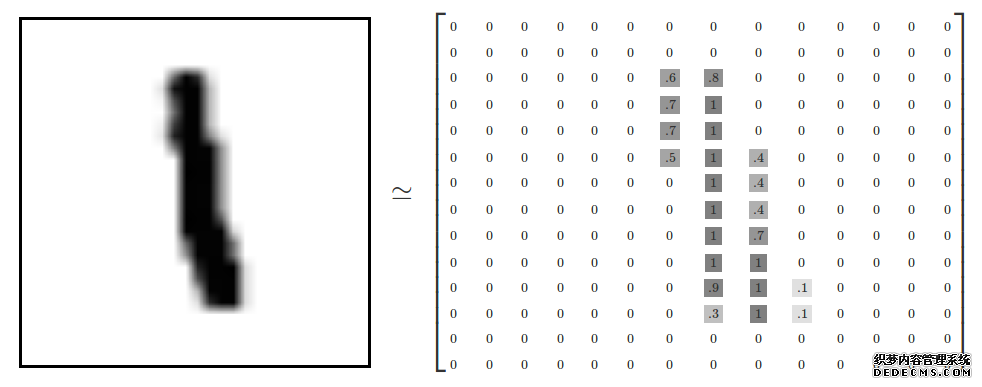
mnist数据集介绍 mnist数据集是比较流行的手写数字数据集之一,其中有60000个训练数据集,10000个测试数据集; mnist数据集文件列表: train-images-idx3-ubyte: 训练集图片 – 已全部转为二进制数组 train-labels-idx1-ubyte: 训练集标签 t10k-images-idx3-ubyte: 测试集图片 ... 
实验原理 视差图计算 深度信息可以通过计算1幅图像和其它图像的特征位置的像素差获得。视差图和深度图很像,因为视差大的像素离摄像机近,而视差小的像素离摄像机远。按以米为单位来计算摄像机距物体多远需要额外的计算。 立体匹配算法的原理 立体匹配算法的原理:就是找出两张图像的对应关系,根据三角测量原理,得到视差图;在获得了视差信息后,根据投影模型很容易地可以得到原始图像的深度信息和三维信息。 局部立体匹配... |
